



About this Workshop
Trajectory Optimization (TO) and Model Predictive Control (MPC) are model-based optimization approaches, built upon Optimal Control theory, which are becoming increasingly popular in robotics. They offer an automatic way to synthesize and stabilize highly dynamic and contact-rich motions, as well as dexterous interactions with the environment: possibilities that are appealing to any robotic system but in particular to legged robots, such as humanoids or quadrupeds.

While TO is commonly used to plan complex open-loop trajectories over a long prediction horizon, MPC enables fast re-planning and feedback stabilization, over a shorter horizon.
Thanks to these techniques, legged systems can autonomously perform disparate tasks, from agile locomotion in complex terrains to dexterous interaction with the surroundings, useful in aiding humans in tedious works and reduce hazards in dangerous environment: running, jumping, climbing, exhibiting highly dynamic manoeuvres such as backflips, as well as accurate manipulation and precise motions are only a portion of the possibilities, with much more to come in the next years.
However, it remains an open question how to employ TO and MPC on real-legged systems effectively. This requires intelligent formulations of contact-constrained robot dynamics, convenient models of the environment, as well as computationally efficient and real-time optimization algorithms.
This workshop aims to inform the robotics research community of recent findings and future directions in TO and MPC applied to legged systems.
Topics of interest
Real-hardware implementation of TO and MPC for dynamic tasks
Whole-body loco-manipulation planning and control
Automatic synthesis of highly dynamic and contact-rich motions
New software tools for nonlinear optimal control
Recent developments in optimization algorithms and real-time optimization
Formulation of appropriate dynamical models for offline and online optimization
Perception and modeling of complex environments for TO and MPC
Speakers
Schedule (JST)
Name
Title
8.30 - 8.55
Farshidian Farbod
ETH Zurich, Zurich, Switzerland
Real-time optimal control for whole-body legged locomotion & manipulation
8.55 - 9.20
Ke Wang
Imperial College, London, UK
9.20 - 9.45
Ye Zhao
Georgia Institute of Technology,
Atlanta, Georgia, USA
9.45 - 10.10
Ludovic Righetti
New York University, NYC,
New York, USA
10.10 - 10.35
Nicola Scianca
University of Rome "La Sapienza",
Rome, Italy
10.35 - 11
Coffee Break + Posters
11 - 11.25
Peter Q. Lee
University of Waterloo, Waterloo,
Ontario, Canada
11.25 - 11.50
Enrico Mingo Hoffman
PAL Robotics
11.50 - 12.15
Francesco Ruscelli
Istituto Italiano di Tecnologia, Genoa,
Italy
12.15 - 12.30
Arturo Laurenzi et al.
Istituto Italiano di Tecnologia, Genoa,
Italy
Maximo Roá et al.
German Aerospace Center (DLR), Wessling, Germany
Manuel Y. Galliker et al.
ETH, Zurich, SWI & California Institute of Technology, Pasadena, CA, USA
Charles Kazoom et al.
Massachussets Institute of Technology (MIT), Cambridge, MA, USA
POSTER: A constrained IterativeLQR Solver for the Trajectory Optimization Framework Horizon
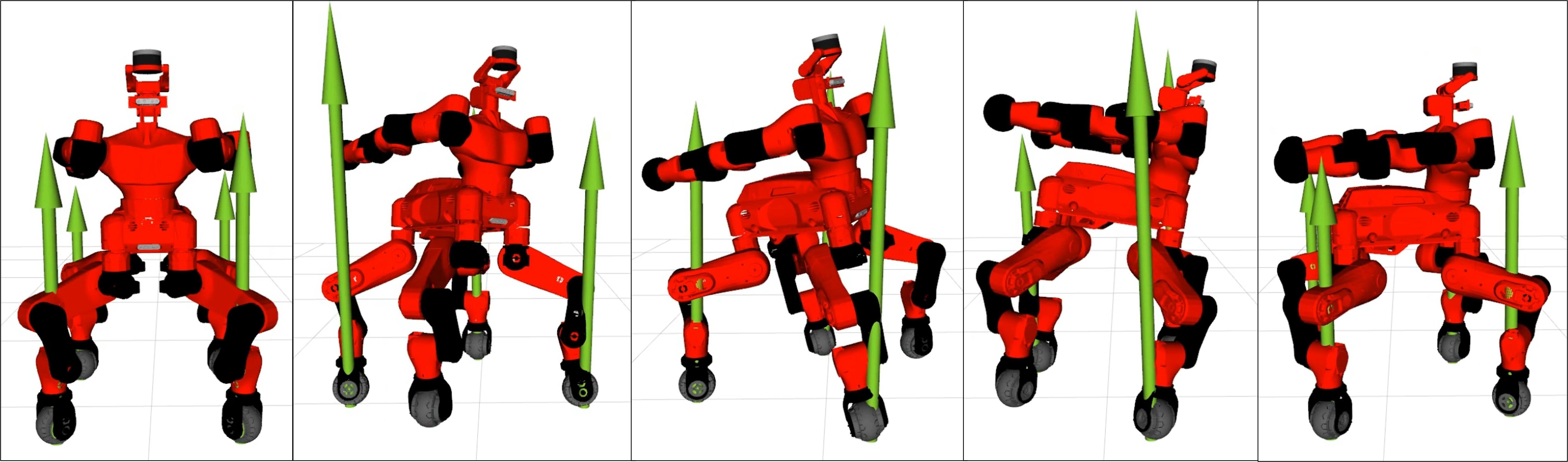
POSTER: Loco-manipulation Tasks for Self-Relocatable Space Robots
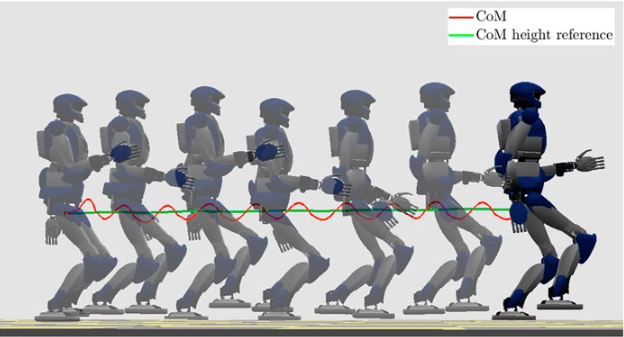
POSTER: Planar Bipedal Locomotion with Nonlinear Model Predictive Control: Online Gait Generation using Whole-Body Dynamics
POSTER: Optimal Scheduling of Models and Horizons for Model Hierarchy Predictive Control
12.30 - 13.30
Lunch
13.30 - 13.55
Nahuel Villa
CNRS/LAAS, Tolouse, France
Advancements in Trajectory Optimization and Model Predictive Control for the TALOS humanoid robot at the Gepetto group
13.55 - 14.20
Katja Mombaur
University of Waterloo, Waterloo, Ontario, Canada
14.20 - 14.45
Jee-eun Lee
University of Texas at Austin
14.45
Closing Remarks
Posters' abstract
A Constrained Iterative LQR Solver for the Trajectory Optimization Framework Horizon
Arturo Laurenzi, Francesco Ruscelli, and Nikos G. Tsagarakis.
Loco-manipulation Tasks for Self-Relocatable Space Robots
Maximo A. Roá, Ismael Rodríguez, Anatoliy Huzynets, Hrishik Mishra, Bernhard Brunner, Gerhard Grunwald
Planar Bipedal Locomotion with Nonlinear Model Predictive Control: Online Gait Generation using Whole-Body Dynamics
Manuel Y. Galliker, Noel Csomay-Shanklin, Ruben Grandia, Andrew J. Taylor, Farbod Farshidian, Marco Hutter, Aaron D. Ames
Optimal Scheduling of Models and Horizons for Model Hierarchy Predictive Control
Charles Khazoom, Steve Heim, Daniel Gonzalez-Diaz and Sangbae Kim
Organizers




Humanoids Conference
The IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS 2021) is the internationally recognized prime event of the humanoid robotics community. Established in 2000 and held annually, the Humanoids Conference is a forum for researchers working in the area of humanoid robots including mechatronics, control, perception, planning, learning, human-robot interaction, biomechanics, artificial intelligence, cognition, and neuroscience.
This workshop is supported by the IEEE RAS Technical Committees on Whole-Body Control and Model-Based Optimization for Robotics.